The multiwii code is very large and can be quiet overwhelming at the beginning(at least for me it was), but once you know that all the important settings are made on the config.h tab it becomes more overseeable. In the following I show the settings that I have chosen so far. Here is the video in which I tested them: http://youtu.be/ad5JCKX0C40
I can`t guarantee that the quadcopter will fly with them, because I didn`t try it yet. When I change something I will update this page.
(Click on the pictures to enlarge them.)
1. Multicopter Type:
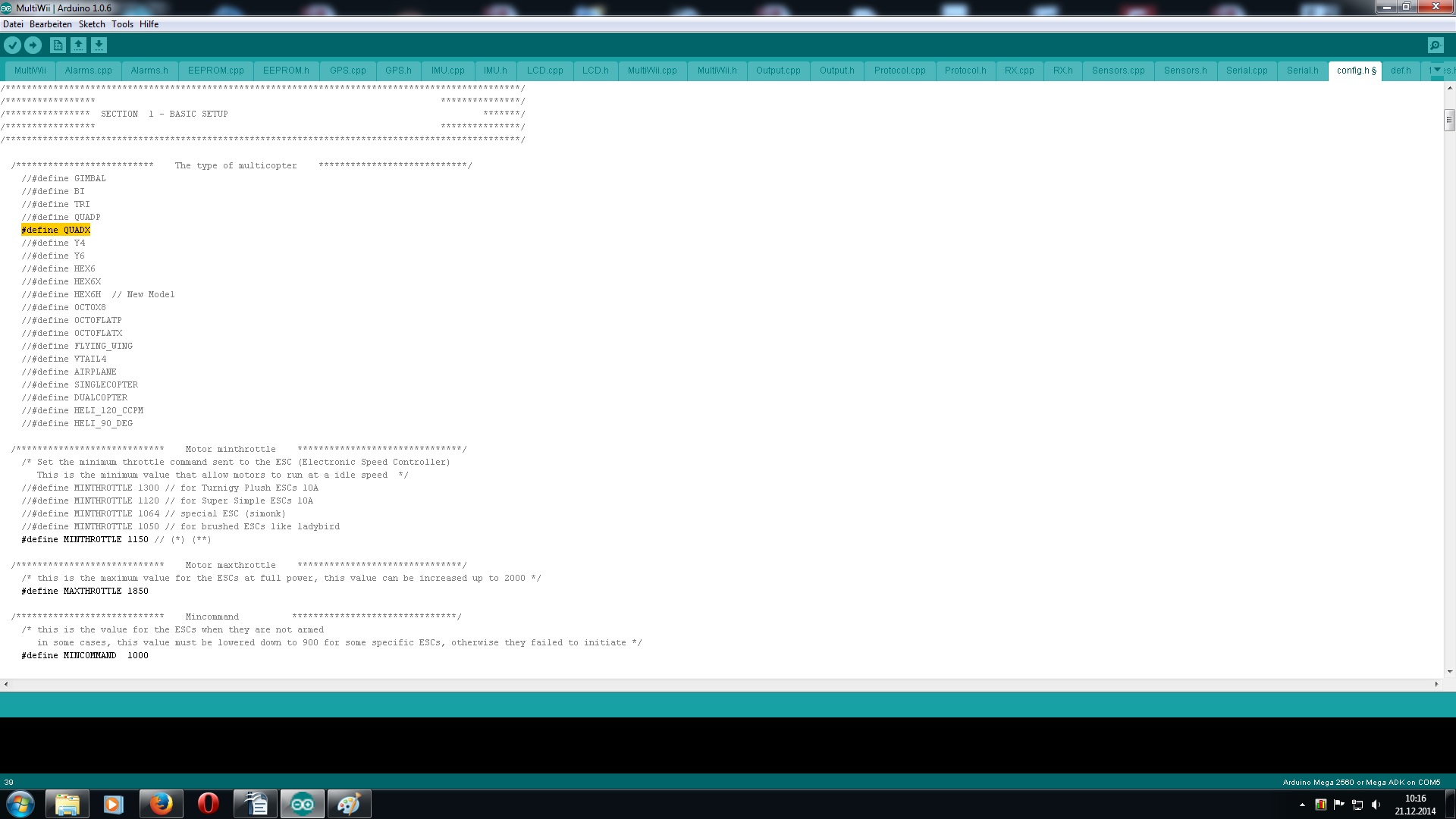 I have an quadcopter and want to fly it in X-configuration. To activate a function you have to remove the //-signs in front of it. Now the “#define QUADX” function is active.
I have an quadcopter and want to fly it in X-configuration. To activate a function you have to remove the //-signs in front of it. Now the “#define QUADX” function is active.
2. Motor Minthrottle and I2C-Speed:
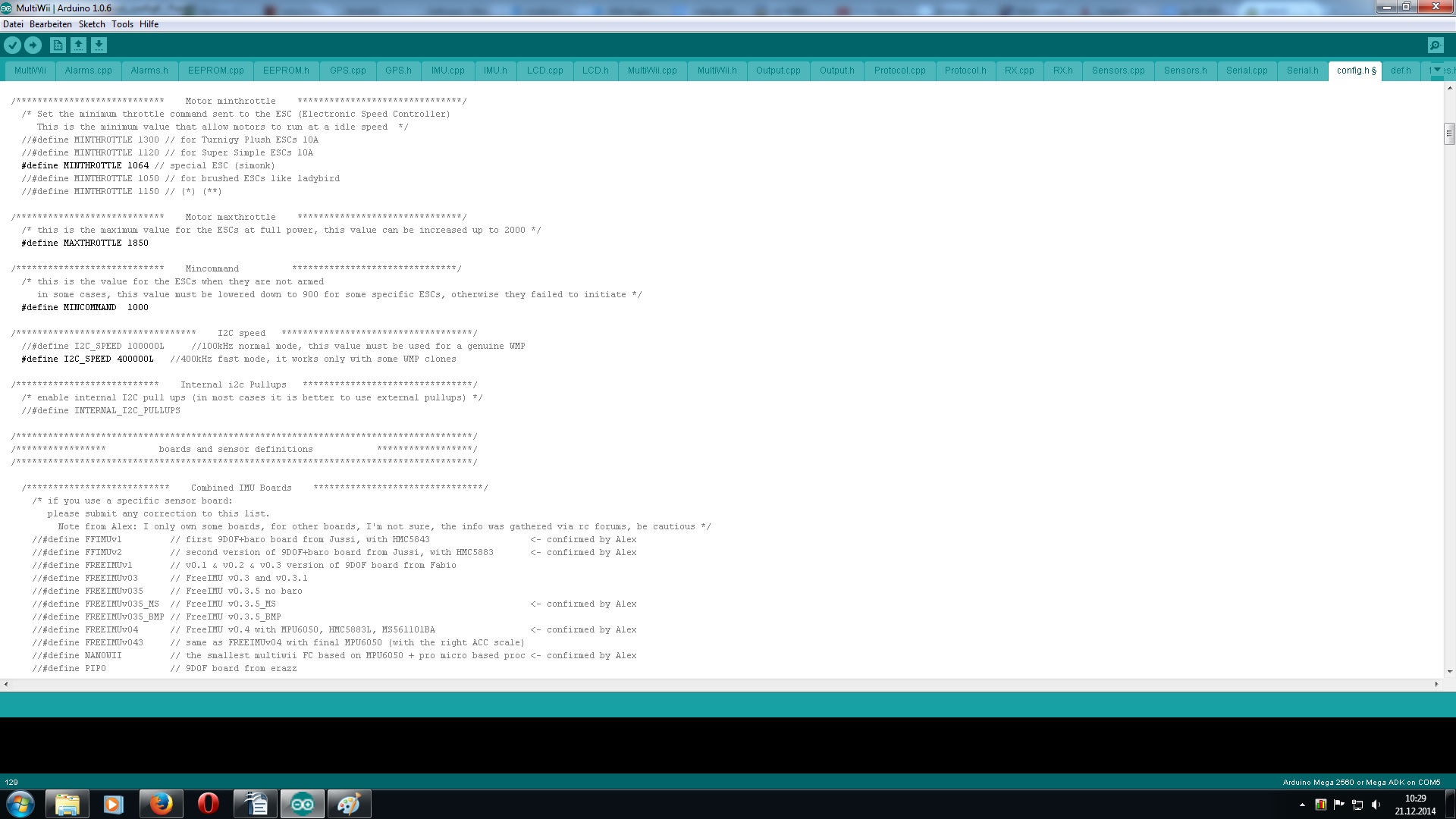 I have SimonK ESCs, so I chose “#define MINTHROTTLE 1064″. I set the I2C- speed to 400kHz by activating “#define I2C_SPEED 400000L”, because the faster the communication between the IMU and the microcontroller, the faster is the flight regulation. If you have a different IMU, just try if it works with 400kHz. If it doesn`t work choose 100kHz. (I think, if it doesn`t work it shows I2C-errors in the MultiWiiConf.)
I have SimonK ESCs, so I chose “#define MINTHROTTLE 1064″. I set the I2C- speed to 400kHz by activating “#define I2C_SPEED 400000L”, because the faster the communication between the IMU and the microcontroller, the faster is the flight regulation. If you have a different IMU, just try if it works with 400kHz. If it doesn`t work choose 100kHz. (I think, if it doesn`t work it shows I2C-errors in the MultiWiiConf.)
Motor maxthrottle and mincommand can be changed later if necessary.
3. The IMU-board:
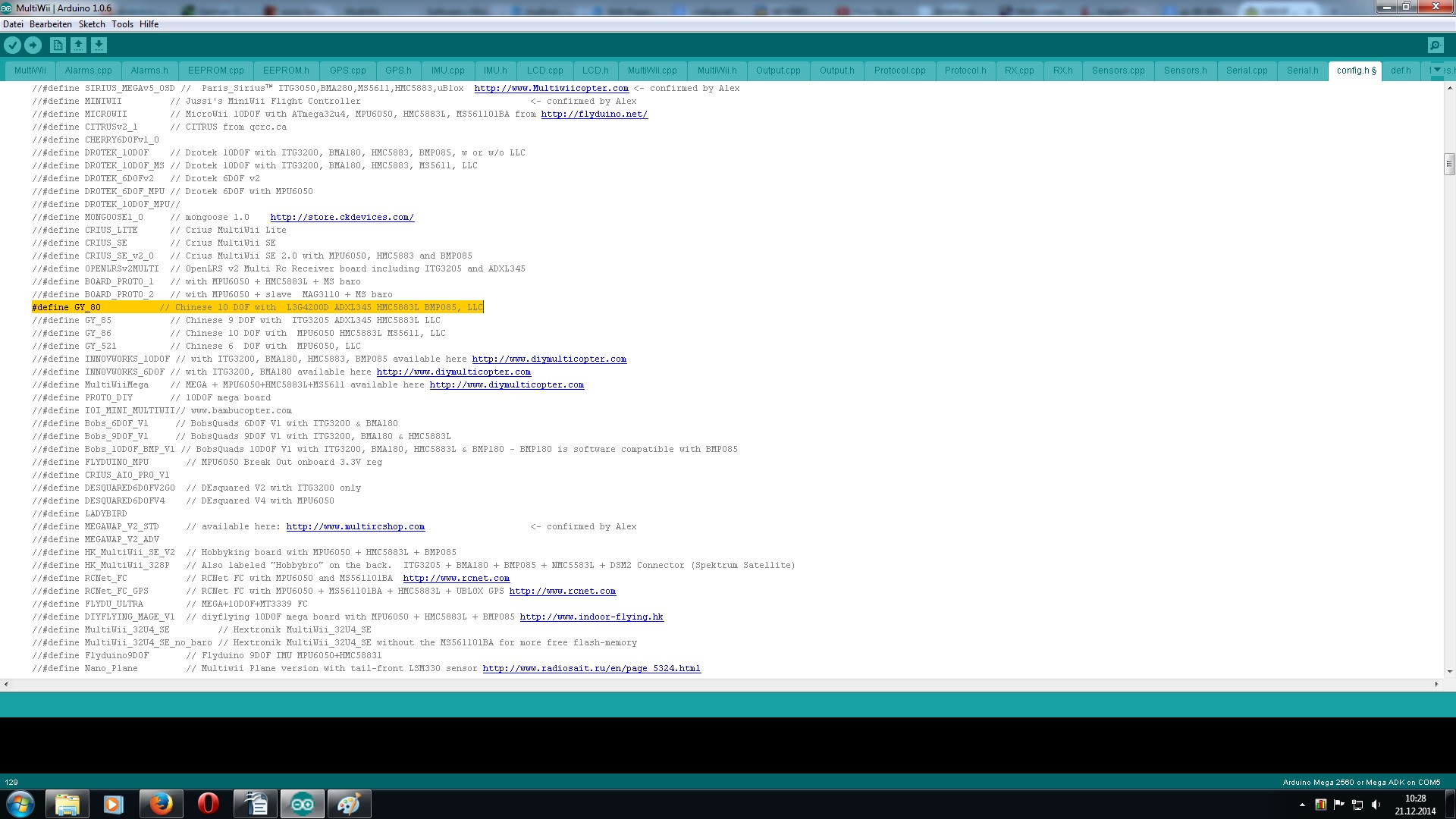 Here I activated “#define GY_80″, because that`s the IMU that I have. It would also be possible to choose the single sensors. That is useful if your IMU is not in the list.
Here I activated “#define GY_80″, because that`s the IMU that I have. It would also be possible to choose the single sensors. That is useful if your IMU is not in the list.
Select the right board and port in the Arduino IDE.
Then I uploaded the sketch to the Arduino Mega(the Sainsmart Mega clone in my case) without any other changes.